Groundbreaking, ground-based autonomy.
Forterra is shaping autonomous vehicle systems to serve and support soldiers and civilians working on the front lines.

Forterra is shaping autonomous vehicle systems to serve and support soldiers and civilians working on the front lines.

AutoDrive is Forterra’s full-stack autonomous vehicle system, designed to bring multi-modal self-driving capabilities to any vehicle platform running in any operating environment.


Running independently or side-by-side with human drivers, AutoDrive helps customers meet complex transportation, logistics and distribution duties efficiently and with increased safety.
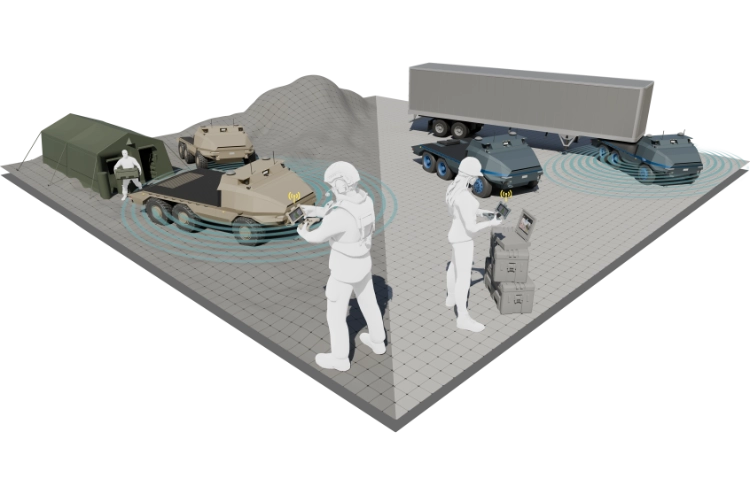
The key measure of AutoDrive success is ensuring autonomous vehicles empower their human counterparts. AutoDrive is rooted in human-centric design to deliver powerful, intuitive technology that elevates the operator.
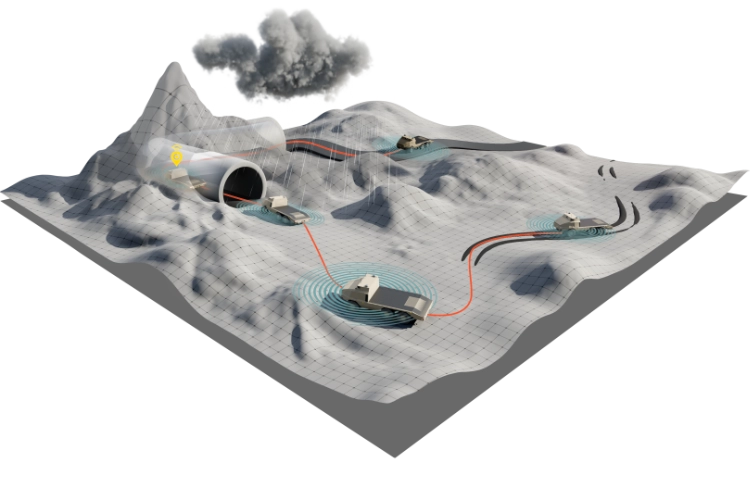
AutoDrive is engineered with the expectation that it must excel in all customer environments as they exist, without need for infrastructure enhancements - from logistics centers, to industrial sites, to battleground terrain with no roads at all.

Going beyond baseline attributes, AutoDrive has been infused with specialized capabilities and autonomous vehicle maneuvers that support differing rules and customer types, based on each’s discreet operating environment.
AutoDrive has deployed to complex industry environments around the globe.






